|
Антонов "Ан-30" в традиционном "72м" :)
|
|
| FX4000_1 | Дата: Понедельник, 16.11.2020, 00:59 | Сообщение # 76 |

Группа: Опытные
Сообщений: 377
Репутация: 327
Награды: 0
Статус: Offline
| Привет моделисты.
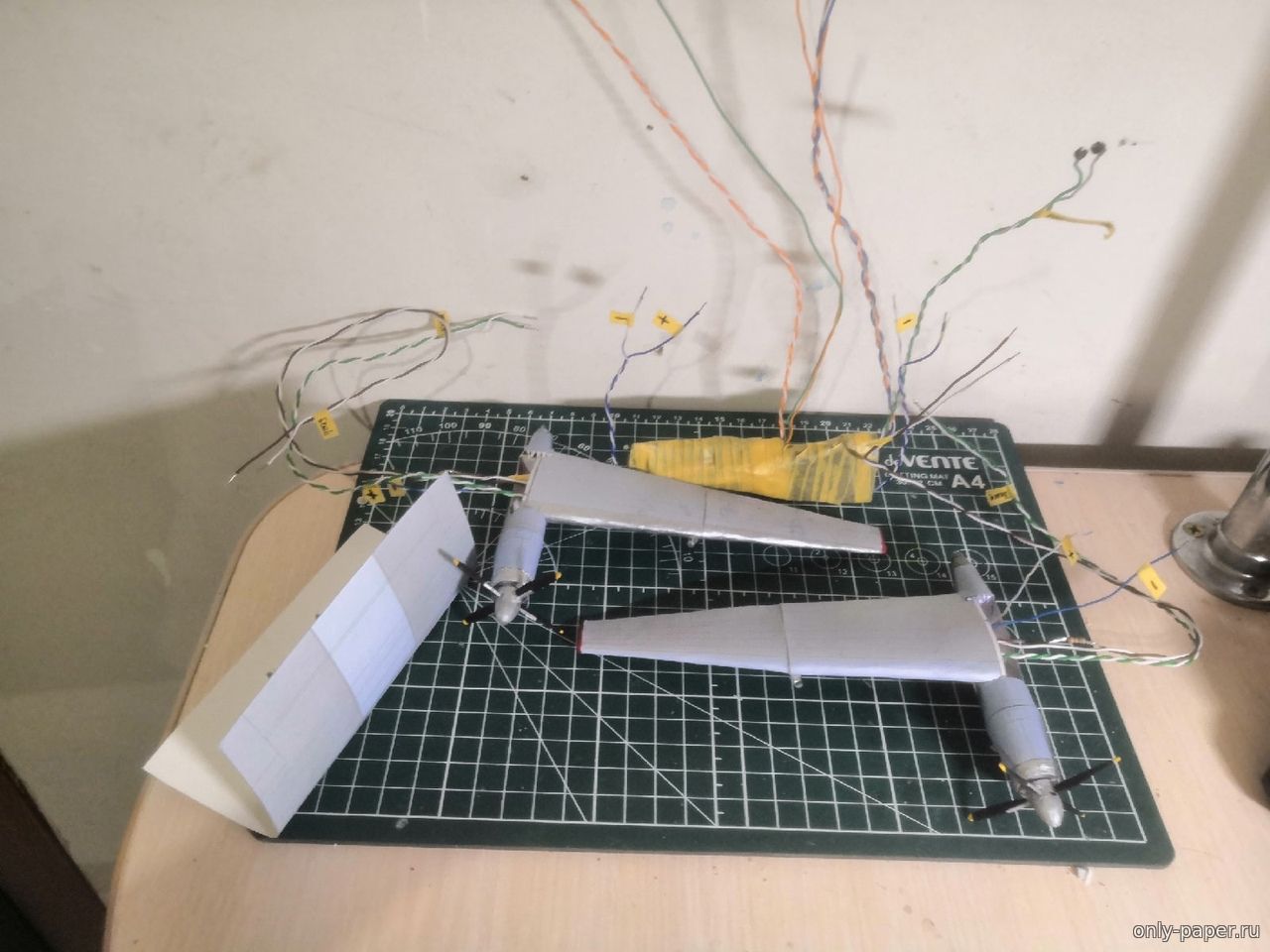
Заканчиваю работу над консолью крыла. Смонтировал основную подсветку и установил двигатели.
На неделе всё протестирую и покажу на видео))





Ан-12
Ил-86
Boeing 737-800
A-320
В сборке:
Антонов-30
|
| |
|
|
| FX4000_1 | Дата: Понедельник, 16.11.2020, 17:21 | Сообщение # 77 |
|
Группа: Опытные
Сообщений: 377
Репутация: 327
Награды: 0
Статус: Offline
| Привет моделисты!
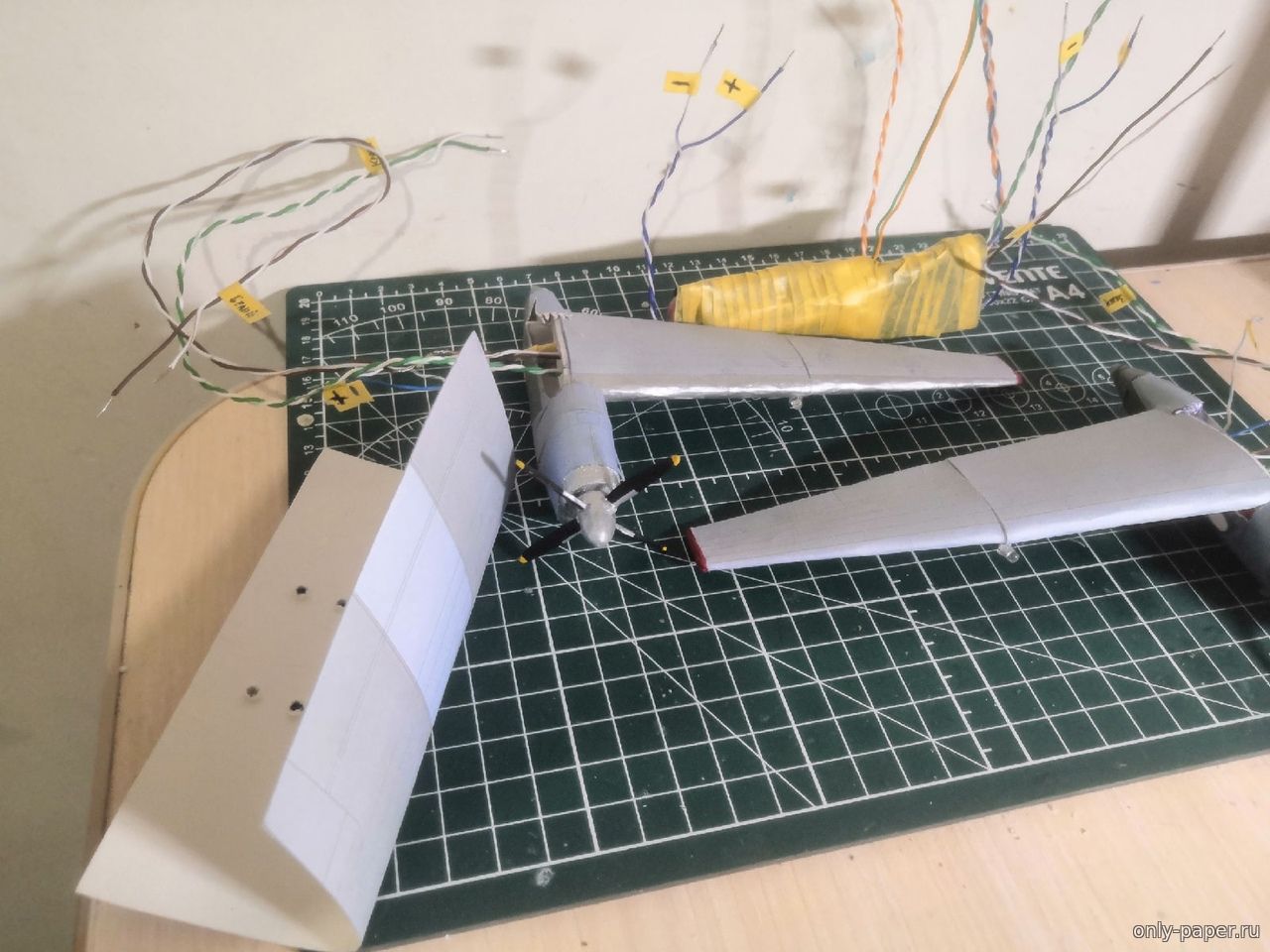
Долго ли скоро ли наконец закончил консоль крыла. Примерил двигатели. Всё работает идеально. Скоро выложу видео тестирования.
Все косяки и недочёты исправлю в ходе сборки:



Ан-12
Ил-86
Boeing 737-800
A-320
В сборке:
Антонов-30
|
| |
|
|
| FX4000_1 | Дата: Пятница, 20.11.2020, 17:33 | Сообщение # 78 |
|
Группа: Опытные
Сообщений: 377
Репутация: 327
Награды: 0
Статус: Offline
| Привет моделисты!
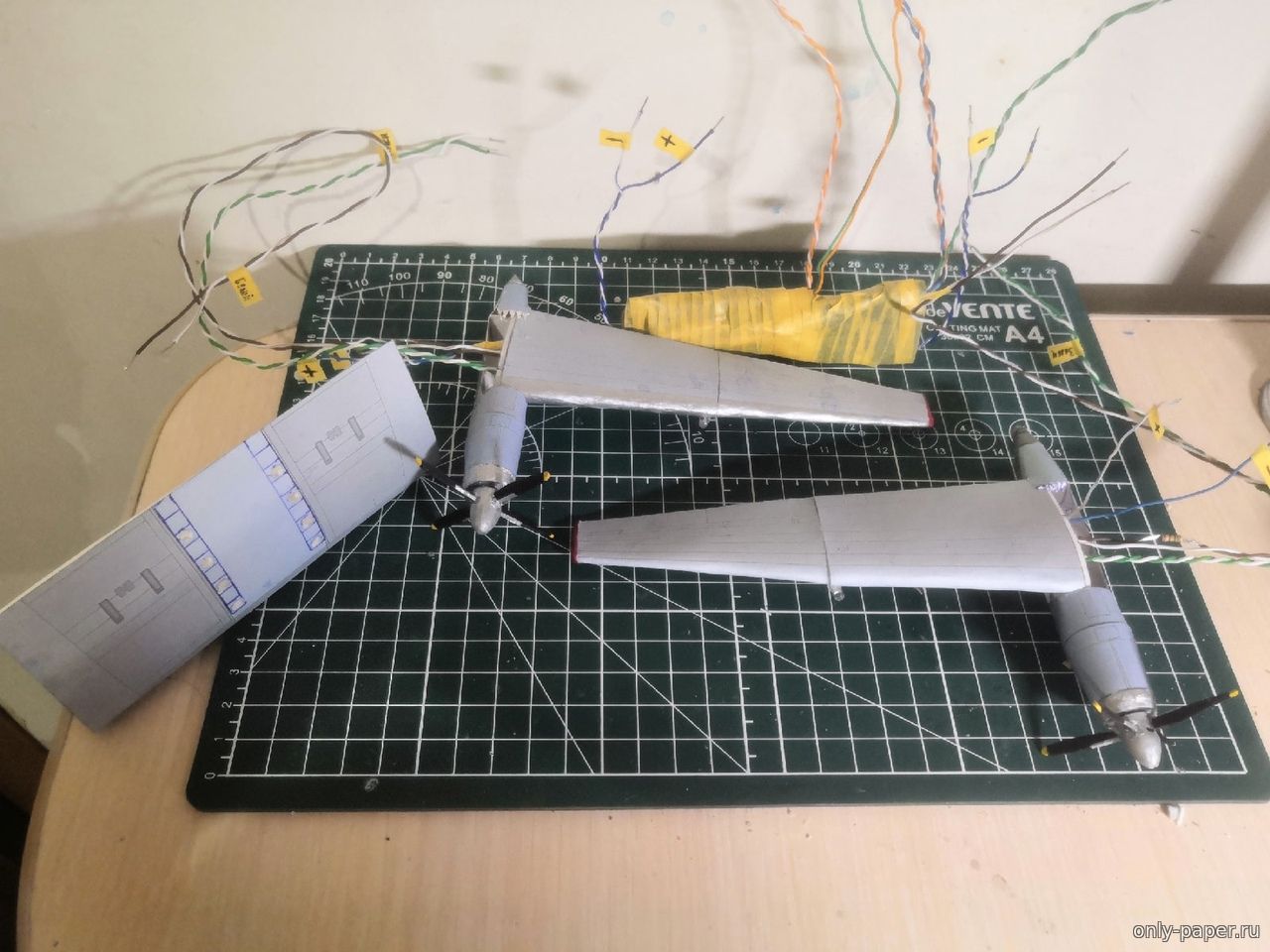
Вот вам ламповый свет в кабинах. Что скажете? Или сделать красноватый оттенок????

Ан-12
Ил-86
Boeing 737-800
A-320
В сборке:
Антонов-30
|
| |
|
|
| FX4000_1 | Дата: Воскресенье, 22.11.2020, 07:38 | Сообщение # 79 |
|
Группа: Опытные
Сообщений: 377
Репутация: 327
Награды: 0
Статус: Offline
| Привет моделисты!
Наконец-то довели мы до ума подсветку самолёта. Это не окончательный вариант. Работа над самолётом кипит.
Ознакомьтесь с видео жду предложений как лучше можно сделать:
https://youtu.be/N_KU8gQk_bU
Напоминаю, что программа управляется на базе микрокомпьютера Arduino.
Ан-12
Ил-86
Boeing 737-800
A-320
В сборке:
Антонов-30
Сообщение отредактировал FX4000_1 - Воскресенье, 22.11.2020, 07:46 |
| |
|
|
| FX4000_1 | Дата: Вторник, 24.11.2020, 14:46 | Сообщение # 80 |
|
Группа: Опытные
Сообщений: 377
Репутация: 327
Награды: 0
Статус: Offline
| Привет моделисты!
Итак. Практически полностью дописали скетч для работы всех устройств.
Выкладываю его сюда если вдруг кто захочет сделать подобное 
Копируйте от слов //РАСПИНОВКА до символа }.
Заливайте в программу Arduino IDE:
https://www.arduino.cc/en/software
Драйвер для микросхем Arduino:
https://iarduino.ru/file/230.html
// РАСПИНОВКА ВЫВОДОВ АРДУИНО:
// пояснения: { номер цифровой ноги, время свечения, время выключенного, время начала отсчёта, включена ли сейчас }
int posad[] = { 4, 1000, 0, 0, 0 ,0 };
int dnische[] = { 2, 450, 1500, 0, 0 ,0 };
int hvost[] = { 11, 100, 900, 0, 0 ,0 };
long krilya[] = { A0, 10000, 0, 0, 0 ,0 };
// пояснения: { номер цифровой ноги, время свечения, время выключенного, время начала отсчёта, горит ли при включении }
// пояснения: номер ноги кнопки номер режима при включении служебное число
int knopka1[] = { 7 , 1, 0 };
int knopka2[] = { 8 , 1, 0 };
int knopka3[] = { 9 , 1, 0 };
int knopka4[] = { 10, 1, 0 };
// АДРЕСНЫЕ СВЕТОДИОДЫ:
#define led_pin 13
// пояснения номер ноги скорость
float motor_a[] = { 5, 0 };
float motor_b[] = { 6, 0 };
// ОКОНЧАНИЕ РАСПИНОВКИ
#include "FastLED.h" // библиотека для работы с адресной лентой
#define LED_COUNT 3 // число светодиодов в ленте
#define SkorostRaskrutki 0.3
int max_bright = 32; // максимальная яркость (0 - 255)
int new_bright;
struct CRGB leds[LED_COUNT];
int i;
int MotorMode = 0 ;
int AdresMode = 0 ;
int LightMode = 0 ;
void setup() {
Serial.begin(9600);
pinMode( posad[0] , OUTPUT);
pinMode( dnische[0], OUTPUT);
pinMode( hvost[0], OUTPUT);
pinMode( krilya[0], OUTPUT);
pinMode( knopka1[0] , INPUT);
pinMode( knopka2[0], INPUT);
pinMode( knopka3[0] , INPUT);
pinMode( knopka4[0], INPUT);
pinMode( motor_a[0], OUTPUT);
pinMode( motor_b[0], OUTPUT);
LEDS.addLeds<WS2811, led_pin, GRB>(leds, LED_COUNT); // настрйоки для нашей ленты (ленты на WS2811, WS2812, WS2812B)
LEDS.setBrightness(max_bright); // ограничить максимальную яркость
LEDS.show(); // отослать команду
}
void loop() {
Serial.println();
// Переключение кабин:
if (digitalRead(knopka1[0])==1)
{
while (digitalRead(knopka1[0])==1) {delay(1);};
AdresMode++;
};
if (AdresMode>3)
{AdresMode=0;};
if ((AdresMode==1) or (AdresMode==2))
{
leds[0] = CRGB(255,0,15);
}
else
{
leds[0] = CRGB(0,0,0);
};
if ((AdresMode==2) or (AdresMode==3))
{
leds[1] = CRGB(255,0,15);
}
else
{
leds[1] = CRGB(0,0,0);
};
LEDS.show(); // отослать команду
// Переключение Освещения :
if (digitalRead(knopka2[0])==1)
{
while (digitalRead(knopka2[0])==1) {delay(10);};
LightMode++;
};
if (LightMode>2)
{LightMode=0;};
if (LightMode==0) // Всё отключено
{
posad[4] = 0;
dnische[4] = 0;
hvost[4] = 0;
krilya[4] = 0;
}
if (LightMode==1) // Включены только посадочные
{
posad[4] = 1;
dnische[4] = 0;
hvost[4] = 0;
krilya[4] = 0;
}
if (LightMode==2) // Включено всё
{
posad[4] = 1;
dnische[4] = 1;
hvost[4] = 1;
krilya[4] = 1;
}
if (posad[4]>0)
{
digitalWrite( posad[0] , HIGH); // включаем светодиод
} else {
digitalWrite( posad[0] , LOW); // выключаем светодиод
};
// Кнопка 3 - управление раскруткой моторов
if ((digitalRead(knopka3[0])==1 ) and (MotorMode==0) )
{
MotorMode=1;
};
if ( (MotorMode==1) and (motor_a[1]<52) )
{
motor_a[1]=motor_a[1]+SkorostRaskrutki;
if (motor_a[1]>35) {MotorMode=2;};
};
if ( (MotorMode==2) and (motor_b[1]<52) )
{
motor_b[1]=motor_b[1]+SkorostRaskrutki;
if (motor_b[1]>35) {MotorMode=3;};
};
analogWrite(motor_a[0], round(motor_a[1]) );
analogWrite(motor_b[0], round(motor_b[1]) );
// Кнопка 4 - ОСТАНОВИТЬ ВСЁ
if (digitalRead(knopka4[0])==1 )
{
MotorMode=0;
AdresMode=0;
LightMode=0;
motor_a[1]=0;
motor_b[1]=0;
};
Serial.print("Кнопки: ");
Serial.print(digitalRead(knopka1[0]));
Serial.print(digitalRead(knopka2[0]));
Serial.print(digitalRead(knopka3[0]));
Serial.print(digitalRead(knopka4[0]));
Serial.print("; Моторы: ");
Serial.print(motor_a[1]);
Serial.print(", ");
Serial.print(motor_b[1]);
Serial.print("; ");
Serial.print("Режимы: Каб:");
Serial.print(AdresMode);
Serial.print(", Осв:");
Serial.print(LightMode);
Serial.print(", Мот:");
Serial.print(MotorMode);
Serial.print(", D4:");
Serial.print( posad[0] );
Serial.print("; ");
DigitalFlash( dnische );
DigitalFlash( hvost );
AnalogFlash( krilya );
} // конец части LOOP
// подпрограмма мигания на ЦИФРОВОЙ ноге
int DigitalFlash ( int InputLamp[4] )
{
if ((InputLamp[5]==0) and (millis()>InputLamp[3]+InputLamp[2]) and (InputLamp[4]>0))
{ // если светодиод НЕ горит и интервал превысил заданный
digitalWrite( InputLamp[0] , HIGH); // включаем светодиод
InputLamp[3]=millis();
InputLamp[5]=1;
};
if (((InputLamp[5]==1) and (millis()>InputLamp[3]+InputLamp[1])) or (InputLamp[4]<1))
{ // если светодиод горит и интервал превысил заданный
digitalWrite( InputLamp[0] , LOW); // выключаем светодиод
InputLamp[3]=millis();
InputLamp[5]=0;
};
return InputLamp;
}
// подпрограмма мигания на АНАЛОГОВОЙ ноге, с ненулевым затуханием
int AnalogFlash ( long InputLamp[5] ) {
if (InputLamp[4]>0)
{
if ((InputLamp[5]==0) and (millis()>InputLamp[3]+InputLamp[2]))
{ // если светодиод НЕ горит и интервал превысил заданный
analogWrite( InputLamp[0] , 1023); // включаем светодиод
InputLamp[3]=millis();
InputLamp[5]=1;
};
if ((InputLamp[5]==1) and (millis()>InputLamp[3]+InputLamp[1]))
{ // если светодиод горит и интервал превысил заданный
analogWrite( InputLamp[0] , 100); // светодиод переводим на слабую яркость
InputLamp[3]=millis();
InputLamp[5]=0;
};
}
else
{
analogWrite( InputLamp[0] , 0); // светодиод переводим на слабую яркость
}
}
Что понадобится для монтажа:
Данные компоненты можно заказать в Китае.
Собственно сама Ardina:
http://арду.рф/product/1745
Радиомодуль на 4 канала.
http://арду.рф/product/1100
Электродвигатели:
http://арду.рф/product/1593
Драйвер:
http://арду.рф/product/1932
Адресная лента в кабину штурмана и пилотов:
http://арду.рф/product/1736
Рекомендую использовать 60 светодиодов на кв.м.
Обычные светодиоды на ваш выбор:
http://арду.рф/shop/536
Резисторы для светодиодов. Рекомендую на 220Ом. ОБЯЗАТЕЛЬНО! Иначе спалите
http://арду.рф/product/1277
Примечание. Радиомодуль НЕ рекомендую ставить в консоль крыла, так как вызывает помехи в его работе. Считаю лучшим вариантом - разместить его в хвосте. Осознал на своем опыте, но переделывать уже не буду. Если на следующем проекте
УФФФФ. Вроде всё :).
Если будут вопросы, общайтесь постараюсь помочь.
Ан-12
Ил-86
Boeing 737-800
A-320
В сборке:
Антонов-30
|
| |
|
|
| romsas | Дата: Вторник, 24.11.2020, 17:59 | Сообщение # 81 |

Группа: Опытные
Сообщений: 983
Репутация: 81
Награды: 0
Статус: Offline
| FX4000_1, вот это круть! Спасибо дорогой товарищ))) Надеюсь когда то запилим борт с мигалками!
|
| |
|
|
| FX4000_1 | Дата: Вторник, 24.11.2020, 18:12 | Сообщение # 82 |
|
Группа: Опытные
Сообщений: 377
Репутация: 327
Награды: 0
Статус: Offline
| romsas, Ром да пожалста)) Если что обращайся подскажу советом)) Хотя сам на косяках учусь)). Скоро выложу тесты с двигателями так что ждите видос
Ан-12
Ил-86
Boeing 737-800
A-320
В сборке:
Антонов-30
|
| |
|
|
| FX4000_1 | Дата: Четверг, 30.09.2021, 20:55 | Сообщение # 83 |
|
Группа: Опытные
Сообщений: 377
Репутация: 327
Награды: 0
Статус: Offline
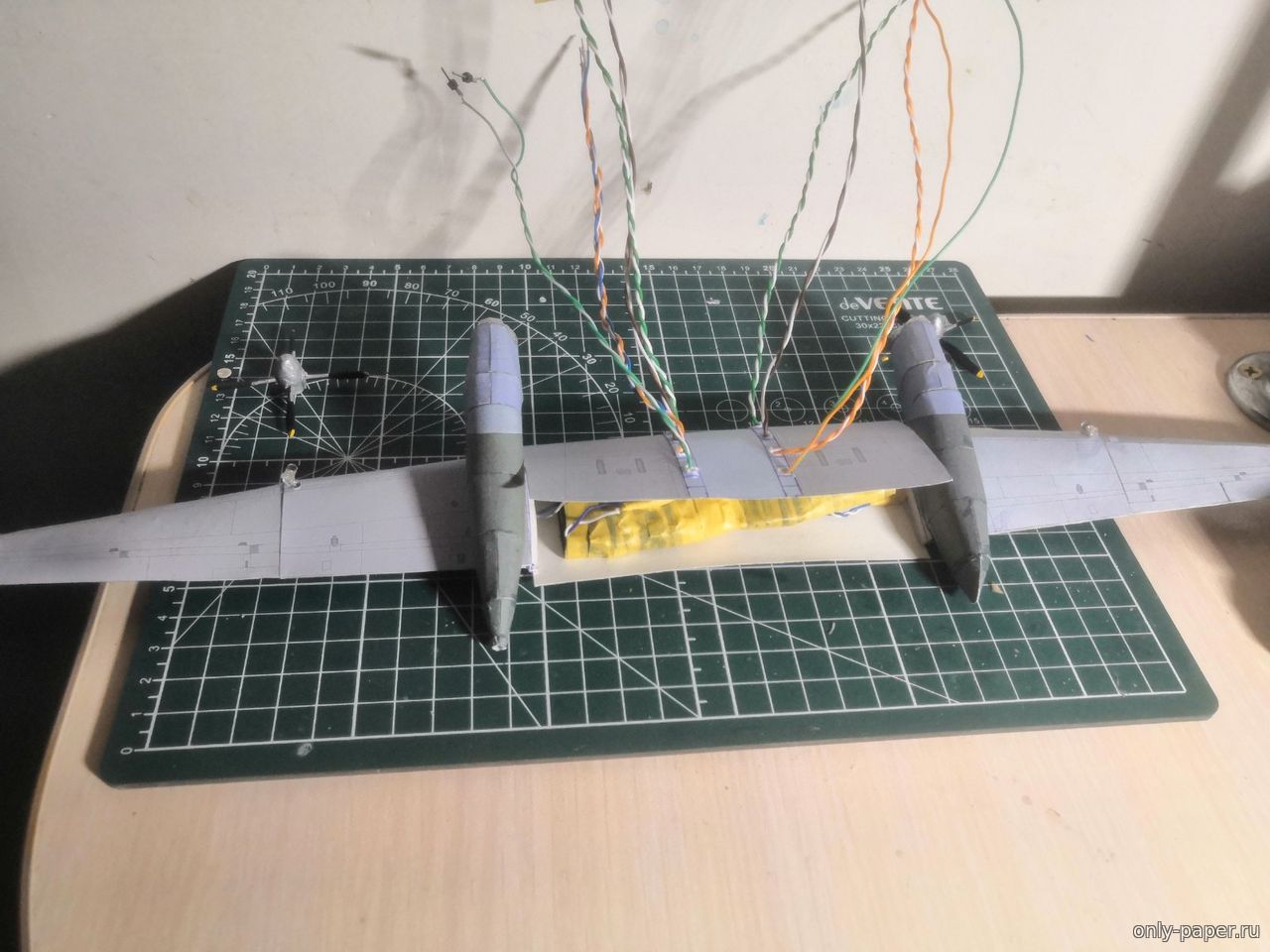
| Ура ура ура моделисты! Наконец-то! Наконец-то дело сдвинулось с мёртвой точки спустя долгое время... увы было над чем поработать.
Нынче закончил полностью всю проводку и монтаж модулей. осталось только все проверить!
Проекту Ан-30 БЫТЬ.


Ан-12
Ил-86
Boeing 737-800
A-320
В сборке:
Антонов-30
|
| |
|
|
| M_I_X_E_Y | Дата: Пятница, 01.10.2021, 18:34 | Сообщение # 84 |

Группа: Мастера
Сообщений: 480
Репутация: 633
Награды: 1
Статус: Offline
| Ну вот. Скоро уже финиш.
SF-24 МиГ-3 ЛаГГ-3 И-1 И-16 тип 10 Fury SPAD VII
В цеху: Ту-128М
|
| |
|
|
| FX4000_1 | Дата: Среда, 13.10.2021, 08:45 | Сообщение # 85 |
|
Группа: Опытные
Сообщений: 377
Репутация: 327
Награды: 0
Статус: Offline
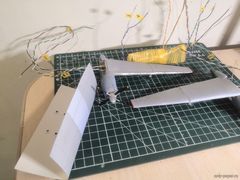
| Привет моделисты!
Вот и долгожданное обновление по Ан-30.
Закончены двигатели для консоли крыла и вся проводка.
Так же готов радиомодуль и драйвер.
Они будут аккуратно спрятаны в средней части консоли.
Вот так это выглядит на стадии:


Ан-12
Ил-86
Boeing 737-800
A-320
В сборке:
Антонов-30
|
| |
|
|
| FX4000_1 | Дата: Четверг, 14.10.2021, 05:06 | Сообщение # 86 |
|
Группа: Опытные
Сообщений: 377
Репутация: 327
Награды: 0
Статус: Offline
| Привет моделисты.
Заканчиваю консоль крыла и вывожу проводку для тестирования:

Ан-12
Ил-86
Boeing 737-800
A-320
В сборке:
Антонов-30
|
| |
|
|
| FX4000_1 | Дата: Понедельник, 18.10.2021, 14:41 | Сообщение # 87 |
|
Группа: Опытные
Сообщений: 377
Репутация: 327
Награды: 0
Статус: Offline
| Привет моделисты!
Вот и первое долгожданное видео работы огней и запуска двигателей самолёта.
https://youtu.be/ZfNgLjxobX8
Ан-12
Ил-86
Boeing 737-800
A-320
В сборке:
Антонов-30
|
| |
|
|
| Modeller | Дата: Вторник, 19.10.2021, 17:56 | Сообщение # 88 |

Группа: Разработчики
Сообщений: 2338
Репутация: 988
Награды: 1
Статус: Offline
| FX4000_1, частота шим низковатая, пищит. Слеганца слишком ярко светят огни.
3DMax
3D фотограмметрия
Формовка листового металла
|
| |
|
|
| FX4000_1 | Дата: Среда, 03.11.2021, 14:27 | Сообщение # 89 |
|
Группа: Опытные
Сообщений: 377
Репутация: 327
Награды: 0
Статус: Offline
| Modeller, Это пищит не ШИМ. А сам движок. Такие у него особенности... А насчёт яркости согласен. Ярковаты посадочные огни... Но думаю тут уже ничего не исправишь...
Ан-12
Ил-86
Boeing 737-800
A-320
В сборке:
Антонов-30
|
| |
|
|
| nothings | Дата: Среда, 03.11.2021, 19:40 | Сообщение # 90 |

Группа: Мастера
Сообщений: 516
Репутация: 1927
Награды: 2
Статус: Offline
| Цитата FX4000_1 (  ) и запуска двигателей
тяга есть? )
Коллекция моих моделей
|
| |
|
|